基本的数学模型¶
相机自身的位置与当前位置下的路标的观测数据。 所以一共两个方程 一个自身的运动方程,另一个对于路标的观测方程。当相机在 \(x_k\) 位置时,看到某个路标点 \(y_j\) ,产生了一个观测数据 \(z_{k,j}\).
\(x_i\) 是相机自身的位姿状态 \(t=1,...,K\) 是 \(u_k\) 是传感器参数, \(w_k\) 是噪声, \(v_{k,j}\) 是观测里的噪声。 相机检测的路标用 \(y_1,...,y_n\) 来表示。
基本的工作流¶
SLAM 的难点,在仅通过计觉里程计算将不避免地出现累计漂移。 当然传感器本身误差不准确,以及和各种噪声的存在。为了解决漂移问题,我们采用两种技术 后端优化与回环检测。 后端优化这就要通过一个nlp优化,而回环检测,就是把机器人回到原始的位置给检测出来。
![digraph G {
graph [layout=dot rankdir=LR];
node [shape=box];
sensor->vo->nlp->map[weight=10];
sensor->loop_check->nlp;
}](_images/graphviz-c2f45a61b119b84e273bc6fcfe6bc1ac344b57fb.png)
传感器¶
- 单目摄像头,无法解决尺度问题
- 双目, 通过视差来解决深度
- RGB-D 深度摄像头
- 激光雷达
- IMU 测量自身的位姿
- GPS
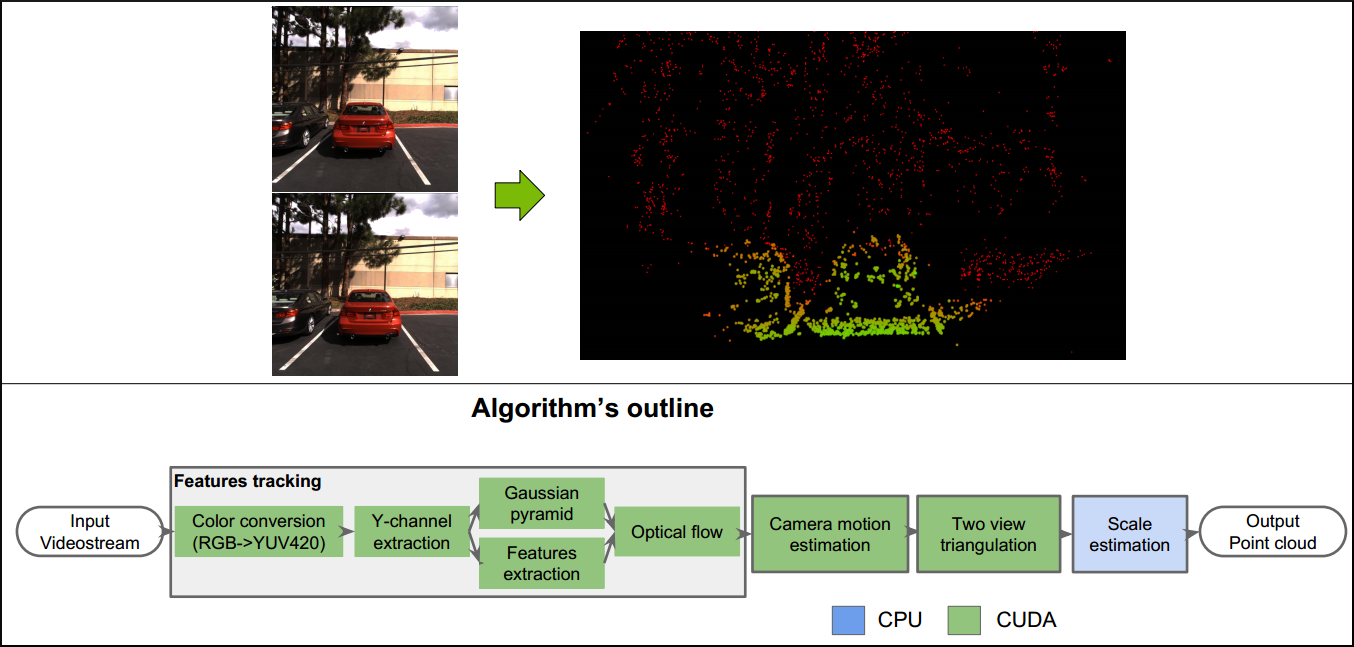
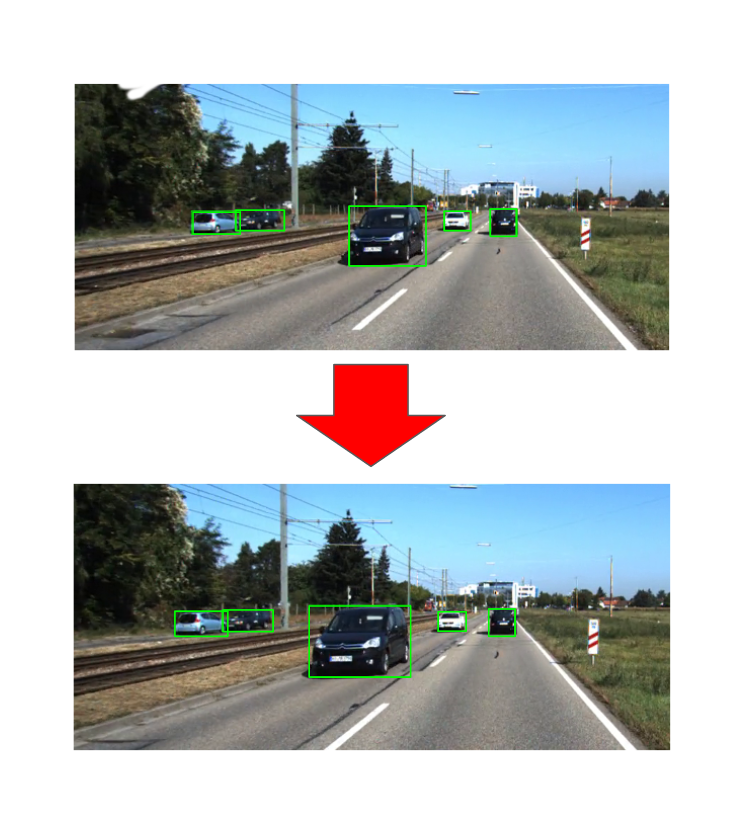
VO¶
主要是解决,计算机是如何通过图像确定相机的运动。相机本身的旋转与平移。 主要是通过相邻帧间的图像估计相机运动。并恢复场景的空间。
特征点,关键点与描述子两部分组成,相似性通过描述子的各种度量距离来计算暴力匹配,可以用汉明距离,当然还快速近假最近邻(FLANN)。 特征是图像信息的另一种数字表达式,我们的目标是要使特征点在相机运动之后保持稳定。
CPU还无法实时计算SIFT特征。当然通过GPU加速后的SIFT,就可以满足实时计算要求。
| 特征点个数 | ORB(Oriented FAST and Rotated BRIEF) | SURF | SIFT |
|---|---|---|---|
| 1000 | 15.3.ms | 217.3ms | 5228.7ms. |
不同的方法,角点的描述能力也不一样。
- 单目的时候,从2D的像素坐标估计相机问题运动,对采用对极几何,多线共面的约束来求。
- 双目 RGB-D, 两组3D点来估计运动,来求平移与旋转,就用ICP来解决。
- 如果3D点与它们在相抽的投影位置,用PnP来估计的相机的运动。
而采用传统图像处理的方法,特征点不稳定,量大,并且特征点不突出,并且没有语义。而现在基于 DL的做法,可以直接得到基于语义的特征点。 特征点: 可重复性,可区另性,高效率,本地性。
特征点的优缺点: 1. 关键点的提取与描述子的计算在耗时。 2. 使用特点点,忽略了除特征点以外的所有信息,相当于丢弃了大部分可能有用的图像信息。 3. 相机在没有明显纹理信息的场景下,会遇到特征缺失,没有找到足够的匹配点来计算机相运动。
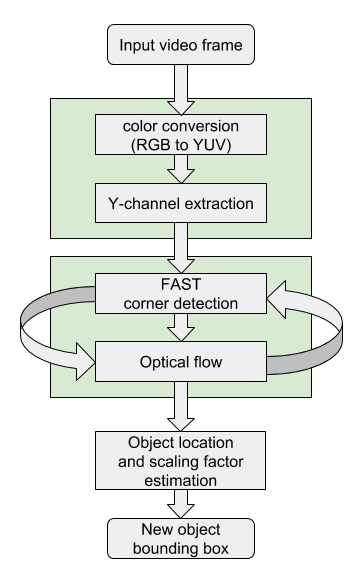
直接法:
- 保留特征点,但不计算描述子。直接发使用光流跟踪,并且直接计算特征点在一时刻的位置,光流法会根据图像像素灰度信息来计算机运动。对光照要求严格。
nlp 非线性优化¶
因为在自然状态下,看到的结果就是当前环境约束下的最优解。 所谓的优化也就是得到一组平衡点。
- 原理根据依赖列出方程组,然后再根据变量的个数建立最小方程组的个数。 最后还能通过量最优解。
- 李群李代数利用旋转与平移矩阵组合李群的特征,然后再通过李代数 把转换成代数约束来建立方程。
- g2o 图优化,就是利用图论的理论来做优化,利用图论,利用变量当做结点,而约束变成边。
- 要么是常规的非线性约束,例如非线性的最小二乘,那就利用Ceres库。
Mapping¶
建立的地图分为两种,度量地图与拓扑地图。 对于拓图地图可以用游戏里的八叉树之类的 来建立。当然这个是建立图形的识别的基础上的,这个地方可以利用生GAN生成模型。
度量地图,就是那种分网格,tiling地图,记录每一个tile里状态。最好多的状态那就是路标信息。
- 稀疏的地图
- 半稠密地图
- 稠密地图
直接用点阵库这样才建立map会太大,可以词态来建立关键链。 当然词态可以用聚类的这些算法来实现。 最简单的结构那就是点云了,这就是利用上了PCL库了。